« Carte Propulsion » : différence entre les versions
Aller à la navigation
Aller à la recherche
Aucun résumé des modifications |
mAucun résumé des modifications |
||
| (Une version intermédiaire par un autre utilisateur non affichée) | |||
| Ligne 4 : | Ligne 4 : | ||
=Principe Général= | =Principe Général= | ||
* L'objectif de la carte est de contrôler en vitesse les 2 moteurs de propulsion. | * L'objectif de la carte est de contrôler en vitesse les 2 moteurs de propulsion. | ||
* | * La régulation de vitesse est assurée par un PIC 18f4525. | ||
* La partie puissance utilise 2 | * La partie puissance utilise 2 ponts en H LMD18200t. | ||
* | * 2 codeurs en quadratures sont reliées aux compteurs du PIC. | ||
* Les | * Les ponts en H gèrent les problèmes de surintensité, surchauffe ... | ||
<br clear="all" /> | <br clear="all" /> | ||
| Ligne 18 : | Ligne 18 : | ||
* Interroger les compteurs du PIC à intervalles réguliers (compteur de vitesse). | * Interroger les compteurs du PIC à intervalles réguliers (compteur de vitesse). | ||
* Calculer l'erreur entre consigne et vitesse. Appliquer une correction selon un algo PID. | * Calculer l'erreur entre consigne et vitesse. Appliquer une correction selon un algo PID. | ||
Autant dire qu'à 40mHz le PIC n'a aucun problème pour calculer tout ça | |||
Le programme reste donc assez simple. Autant dire qu'à 40mHz le PIC n'a aucun problème pour calculer tout ça. | |||
Version actuelle datée du 8 octobre 2008 à 21:46

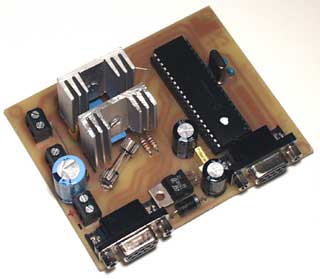
Carte Propulsion
Principe Général
- L'objectif de la carte est de contrôler en vitesse les 2 moteurs de propulsion.
- La régulation de vitesse est assurée par un PIC 18f4525.
- La partie puissance utilise 2 ponts en H LMD18200t.
- 2 codeurs en quadratures sont reliées aux compteurs du PIC.
- Les ponts en H gèrent les problèmes de surintensité, surchauffe ...
Architecture
Logiciel
Ses tâches :
- Recevoir les consignes de vitesse et de sens via I2C.
- Interroger les compteurs du PIC à intervalles réguliers (compteur de vitesse).
- Calculer l'erreur entre consigne et vitesse. Appliquer une correction selon un algo PID.
Le programme reste donc assez simple. Autant dire qu'à 40mHz le PIC n'a aucun problème pour calculer tout ça.
Hardware

Photo du LMD18200t

Pinout du LMD18200t


La partie puissance est confiée à 2 ponts en H intégrés. Ce sont des LMD18200t (http://www.penseeprofonde.org/images/2/22/Pdf_icon.png Datasheet http://www.penseeprofonde.org/images/d/da/Info_circle.png).
{kind=link}
Leurs fonctionnalités les plus intéressantes sont :
- Délivre 3A en continu.
- Alerte et protection de surchauffe.
- Diodes de roue libre intégrées.
Connectique
Connecteur Hub
- Utilisation: Intègre RS232, I2C, Alim selon le standard Pensée Profonde
- Format: DB9
Codeurs
- Utilisation : Connexion avec les codeurs
- Format: DB9
- Pinout:
- 1 : 12v
- 2 : 5v
- 3 : masse
- 4 : canal A1
- 5 : canal B1
- 6 : 5v
- 7 : masse
- 8 : canal A2
- 9 : canal B2
Alimentation secondaire
- Utilisation: Alimentation fort ampérage
- Format: bornier à vis 2 fils
- Pinout :
- 1 : 12v
- 2 : masse