« Carte Propulsion » : différence entre les versions
Aller à la navigation
Aller à la recherche
Aucun résumé des modifications |
Aucun résumé des modifications |
||
| Ligne 4 : | Ligne 4 : | ||
=Principe Général= | =Principe Général= | ||
* | * L'objectif de la carte est de contrôler en vitesse les 2 moteurs de propulsion. | ||
* Le contrôle | * Le contrôle est géré par un PIC 18f4525. | ||
* La partie puissance utilise 2 pont en H LMD18200t. | |||
* 4 entrées pour 2 codeurs en quadratures sont reliées aux compteurs du PIC. | * 4 entrées pour 2 codeurs en quadratures sont reliées aux compteurs du PIC. | ||
* Les pont en H gère les problèmes (surintensité, surchauffe ...). | * Les pont en H gère les problèmes (surintensité, surchauffe ...). | ||
<br clear="all" /> | <br clear="all" /> | ||
= | =Architecture= | ||
== | ==Logiciel== | ||
Ses tâches : | |||
* Recevoir les consignes de vitesse et de sens via I2C. | |||
* Interroger les compteurs du PIC à intervalles réguliers (compteur de vitesse). | |||
* Calculer l'erreur entre consigne et vitesse. Appliquer une correction selon un algo PID. | |||
Autant dire qu'à 40mHz le PIC n'a aucun problème pour calculer tout ça :) | |||
==Hardware== | |||
<div style="float:right;"> | <div style="float:right;"> | ||
<gallery> | <gallery> | ||
| Ligne 20 : | Ligne 28 : | ||
</gallery> | </gallery> | ||
</div> | </div> | ||
Ce sont des [http://www.national.com/pf/LM/LMD18200.html LMD18200t] ({{pdf|LMD18200.pdf|Datasheet}}). | La partie puissance est confiée à 2 ponts en H intégrés. Ce sont des [http://www.national.com/pf/LM/LMD18200.html LMD18200t] ({{pdf|LMD18200.pdf|Datasheet}}). | ||
Leurs fonctionnalités les plus intéressantes sont : | |||
* Délivre 3A en continu. | * Délivre 3A en continu. | ||
* Alerte et protection de surchauffe. | * Alerte et protection de surchauffe. | ||
| Ligne 34 : | Ligne 42 : | ||
===Codeurs=== | ===Codeurs=== | ||
*Utilisation : | *Utilisation : Connexion avec les codeurs | ||
*Format: DB9 | *Format: DB9 | ||
*Pinout: | *Pinout: | ||
| Ligne 48 : | Ligne 56 : | ||
===Alimentation secondaire=== | ===Alimentation secondaire=== | ||
*Utilisation: Alimentation fort | *Utilisation: Alimentation fort ampérage | ||
*Format: bornier à vis 2 fils | *Format: bornier à vis 2 fils | ||
*Pinout : | *Pinout : | ||
** 1 : 12v | ** 1 : 12v | ||
** 2 : masse | ** 2 : masse | ||
Version du 18 juillet 2008 à 21:12

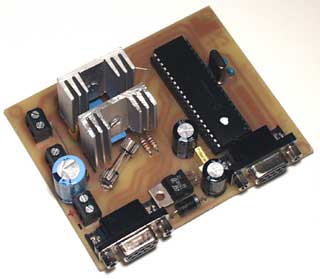
Carte Propulsion
Principe Général
- L'objectif de la carte est de contrôler en vitesse les 2 moteurs de propulsion.
- Le contrôle est géré par un PIC 18f4525.
- La partie puissance utilise 2 pont en H LMD18200t.
- 4 entrées pour 2 codeurs en quadratures sont reliées aux compteurs du PIC.
- Les pont en H gère les problèmes (surintensité, surchauffe ...).
Architecture
Logiciel
Ses tâches :
- Recevoir les consignes de vitesse et de sens via I2C.
- Interroger les compteurs du PIC à intervalles réguliers (compteur de vitesse).
- Calculer l'erreur entre consigne et vitesse. Appliquer une correction selon un algo PID.
Autant dire qu'à 40mHz le PIC n'a aucun problème pour calculer tout ça :)
Hardware

Photo du LMD18200t

Pinout du LMD18200t


La partie puissance est confiée à 2 ponts en H intégrés. Ce sont des LMD18200t (http://www.penseeprofonde.org/images/2/22/Pdf_icon.png Datasheet http://www.penseeprofonde.org/images/d/da/Info_circle.png).
{kind=link}
Leurs fonctionnalités les plus intéressantes sont :
- Délivre 3A en continu.
- Alerte et protection de surchauffe.
- Diodes de roue libre intégrées.
Connectique
Connecteur Hub
- Utilisation: Intègre RS232, I2C, Alim selon le standard Pensée Profonde
- Format: DB9
Codeurs
- Utilisation : Connexion avec les codeurs
- Format: DB9
- Pinout:
- 1 : 12v
- 2 : 5v
- 3 : masse
- 4 : canal A1
- 5 : canal B1
- 6 : 5v
- 7 : masse
- 8 : canal A2
- 9 : canal B2
Alimentation secondaire
- Utilisation: Alimentation fort ampérage
- Format: bornier à vis 2 fils
- Pinout :
- 1 : 12v
- 2 : masse